Исследования, разработка и изготовление лабораторного стенда для систем ориентации
Для физических испытаний систем ориентации и стабилизации космических аппаратов применяют комбинации генератора внешнего магнитного поля и специальных систем удержания (например аэродинамическая опора). Такие испытания позволяют проверить корректность результатов математического моделирования и фактические настройки аппарата.
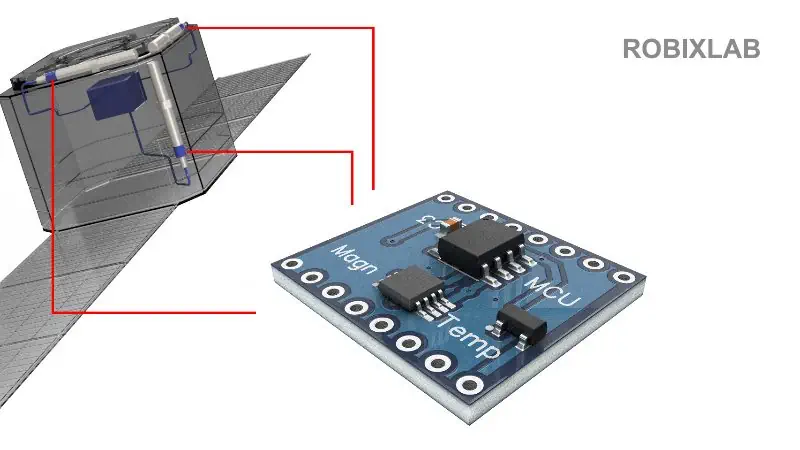
Наш генератор магнитного поля оптимизирован для малых спутников с габаритом до 80см и позволяет задавать направление и силу магнитного поля (включая обнуление внешнего поля).
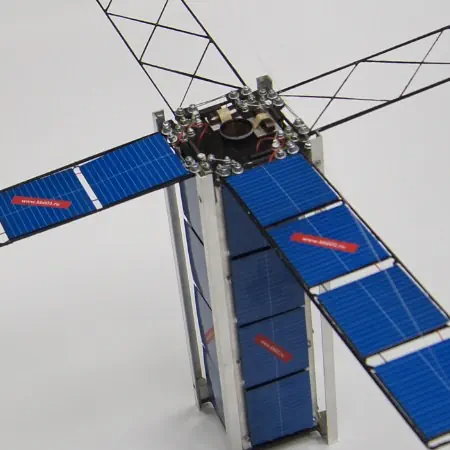
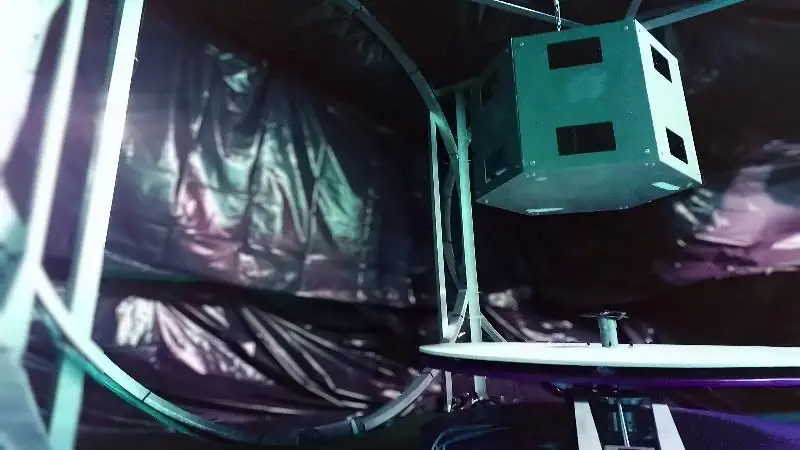
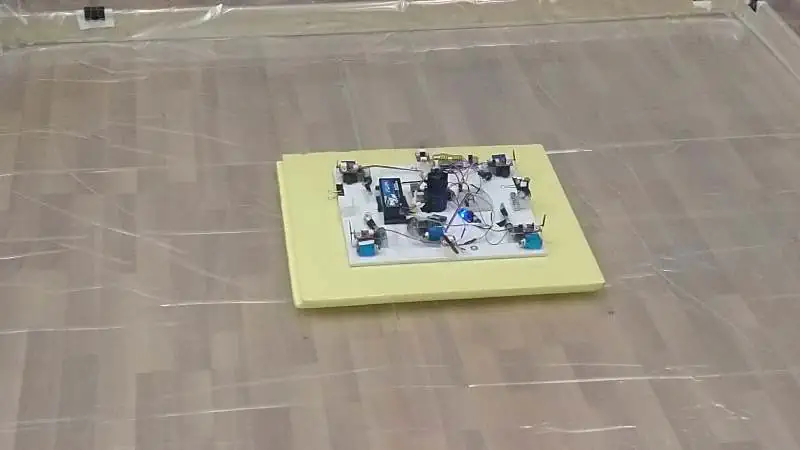
Главным уникальным элементом стенда является наш подвес для спутника, который не содержит аэродинамических опор, а состоит из длинной струны (2 этажа), привода поворота и системы компьютерного зрения, которая обеспечивает непрерывное обнуление возникающего в струне крутящего момента от вращения спутника. Эта система позволяет сохранять параметры вращения спутника на протяжении нескольких часов, сам спутник находится в полностью собранном состоянии, а главное — вся система и спутник с его двигателями могут работать (проходить испытания) внутри вакуумной камеры.
Так же экспериментальная установка обладает несколькими независимыми системами перемещения внешнего оборудования вокруг спутника. Эти системы позволяют проверять работу алгоритмов ориентации на Солнце, поиск объектов и созвездий, наведение антенн.