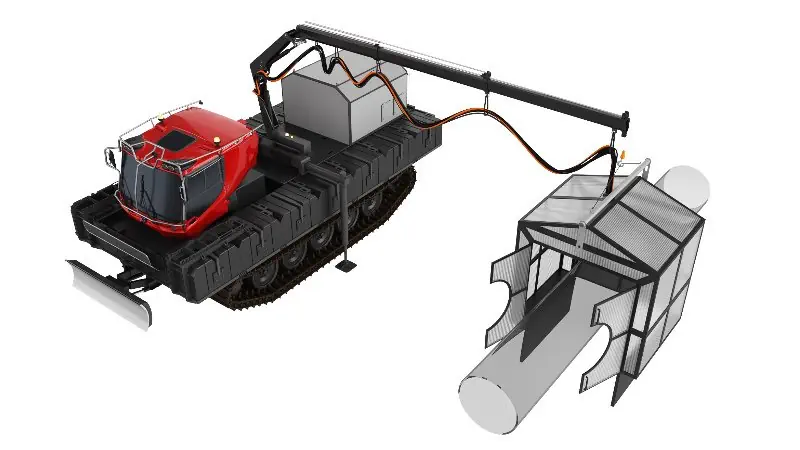
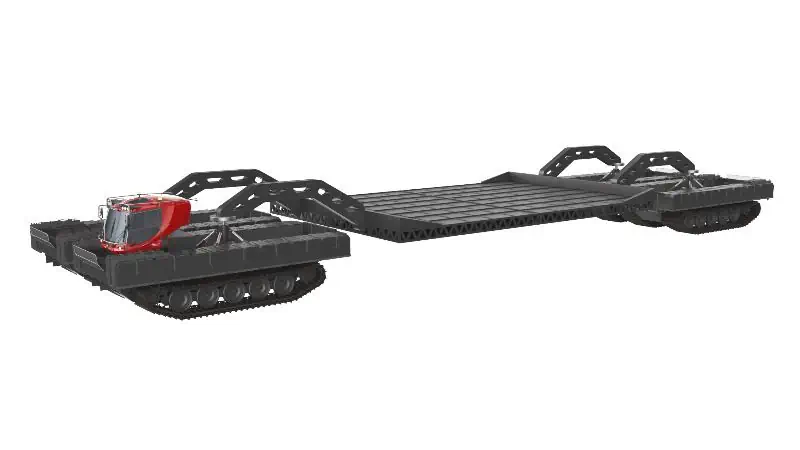
Промдизайн экстерьера и разработка конфигураций колёсного вездехода
Целью проекта было создание облика вездехода под существующее шасси и стандартный корпус кабины водителя (она задаёт стиль дизайна).
Необходимо было разработать визуальный стиль и конструкцию передней части автомобиля с учётом особенностей его эксплуатации и габаритов. Так как высота колеса составляет 1,6метра, то необходимо было обеспечить возможность стоять на поверхности колёсных арок и бампера для обеспечения доступа под капот. Машина эксплуатируется на отдалённых территориях, в том числе за полярным кругом, поэтому должна быть приспособлена к ремонту вне станции технического обслуживания.
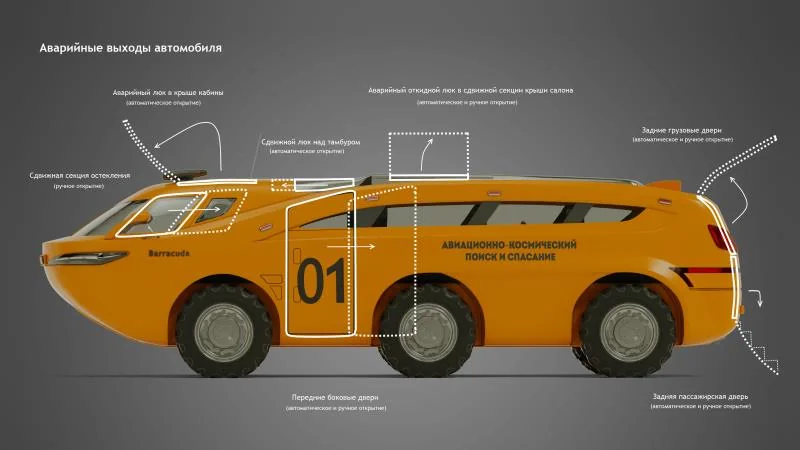
Колёсные арки выполнены съемными, т. к. для перемещениям по дорогам общего пользования применяются уменьшенные колёса (для уменьшения габарита). Вся светотехника выполнена с бронированным остеклением и работает в двух режимах, оптимизированных под большие и малые колёса. Моторный отсек снизу защищён бронеплитой с уклоном, переходящей в силовой бампер, внутри размещается механизм лебёдки.
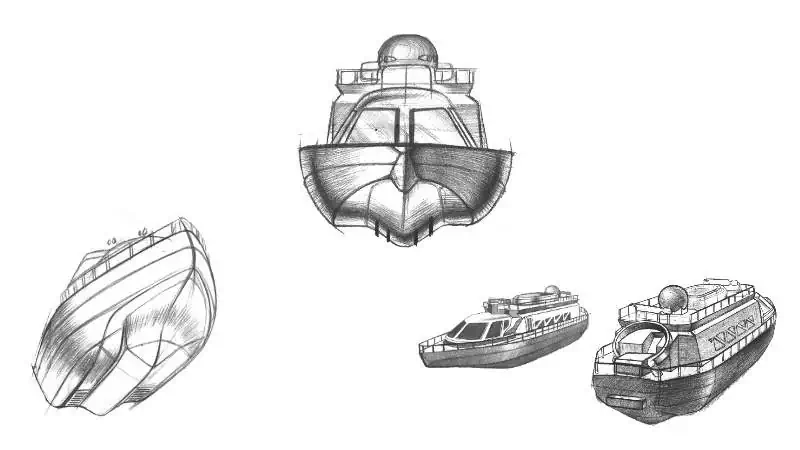
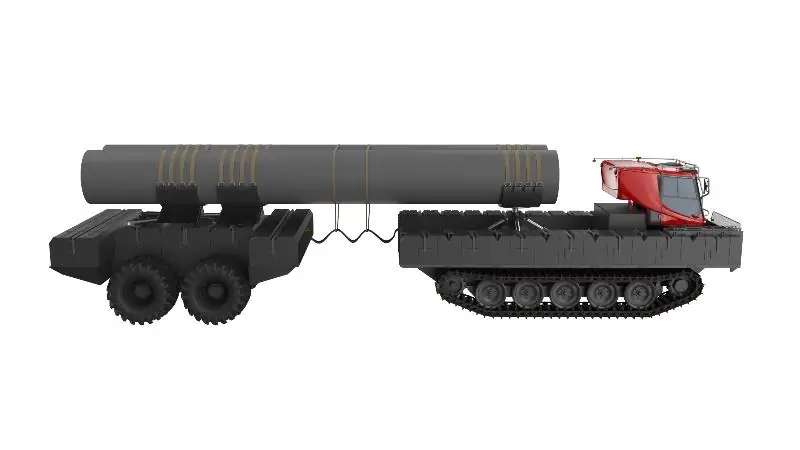
Так же разработаны корпуса функциональных модулей для размещения на автомобиле: пассажирский и технологический.
Пассажирский модуль позволяет перевозить команду рабочих и используется для бытовых целей, возможна версия для длительного проживания в нём. Конструкция корпуса предусматривает утепление и специальные бортовые системы для автономной эксплуатации при температурах до -60 градусов цельсия.
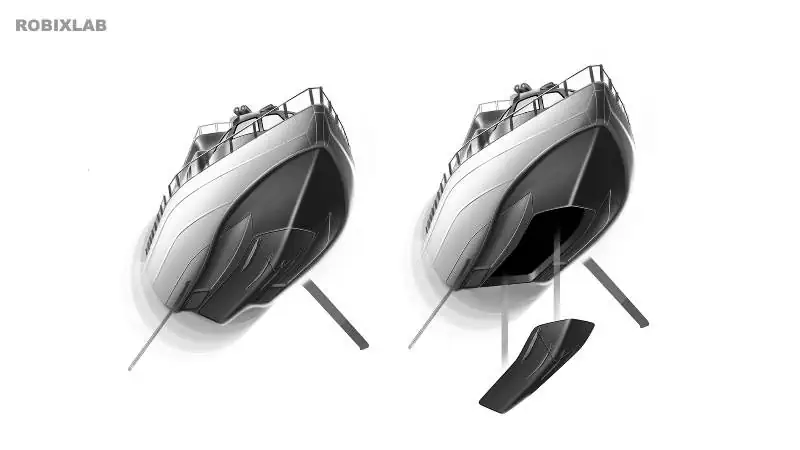
Технологический модуль предназначен для размещения рабочих верстаков и не крупного оборудования на уровне столов. Так как нижние углы корпуса не используются, то мы применили нестандартную усечённую форму для корпуса, что позволило при неизменной высоте машины увеличить высоту внутреннего пространства технологического модуля.