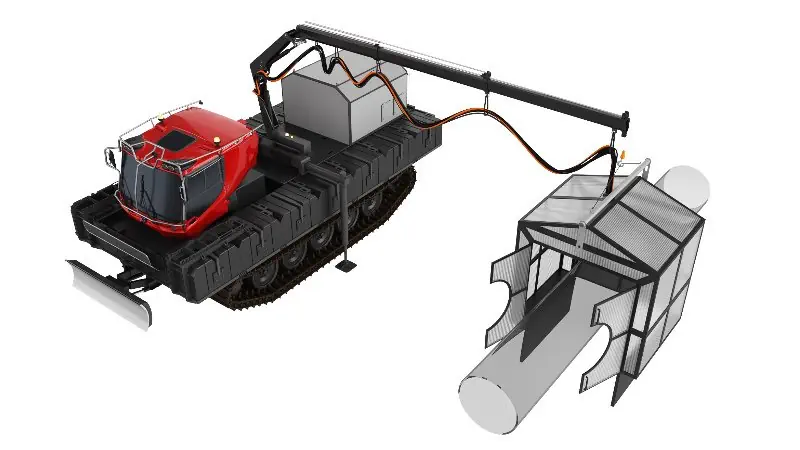
Industriell utformning av exteriör och utveckling av konfigurationer av terrängfordon med hjul
Syftet med projektet var att skapa ett utseende för terrängfordonet under det befintliga chassit och den vanliga förarhyttskroppen (den anger designstilen).
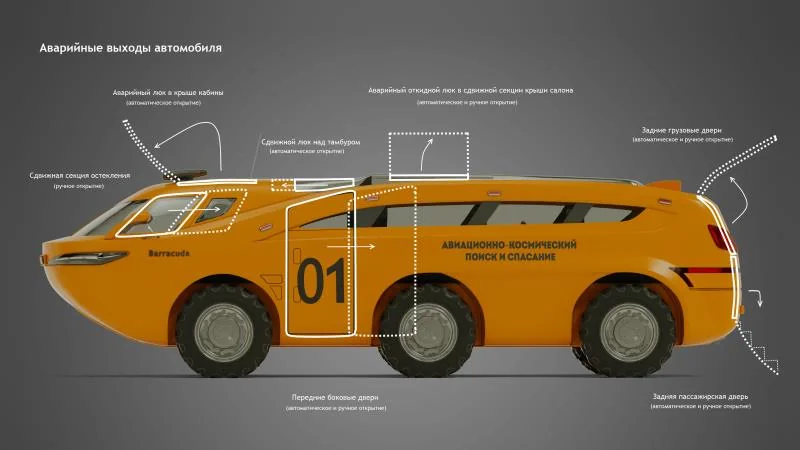
Den visuella stilen och utformningen av fordonets framsida måste utvecklas för att passa fordonets hantering och dimensioner. Eftersom hjulhöjden är 1,6 meter måste det vara möjligt att stå på ytan av hjulhusen och stötfångaren för att komma in under motorhuven. Maskinen används i avlägsna områden, även bortom polcirkeln, så den måste kunna repareras utanför bensinstationen.
Hjulhusen är avtagbara, eftersom mindre hjul används för resor på allmänna vägar (för att minska den totala storleken). All belysningsutrustning är pansarglaserad och fungerar i två lägen, optimerade för stora och små hjul. Motorrummet längst ner är skyddat av en lutande pansarplatta som sträcker sig in i stötfångaren, och vinschmekanismen är placerad inuti.
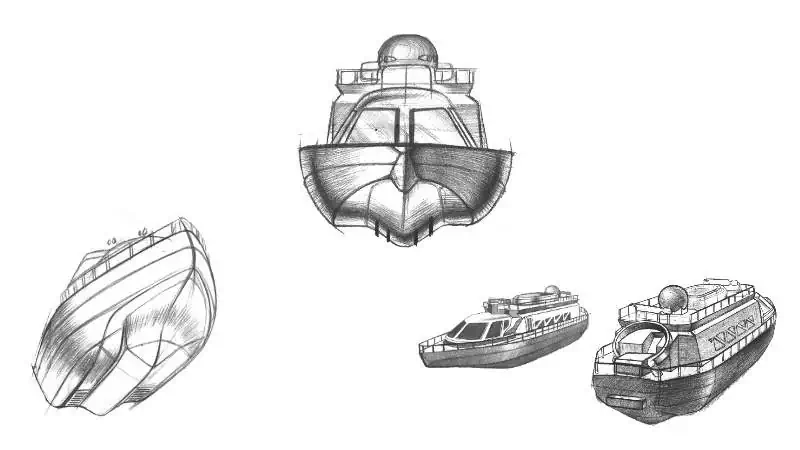
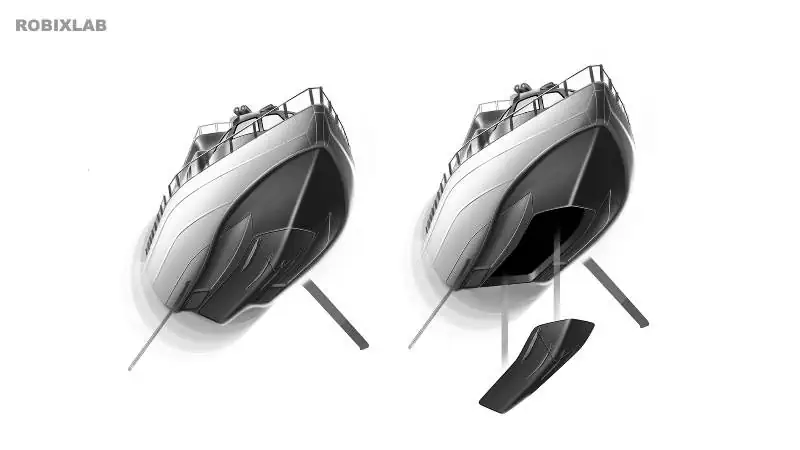
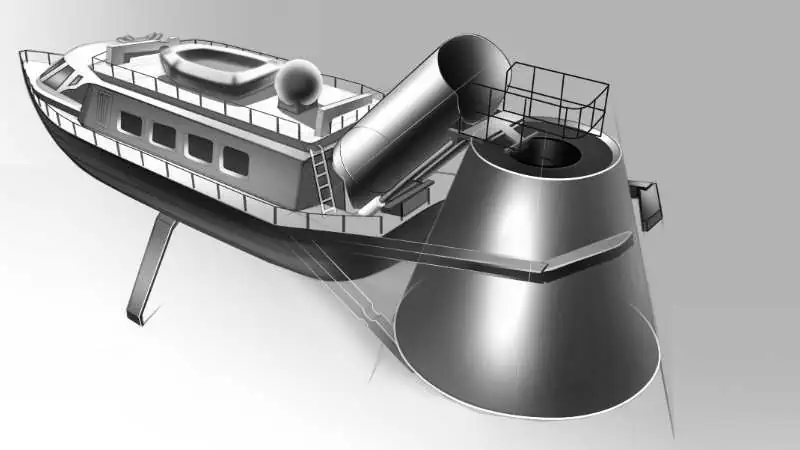
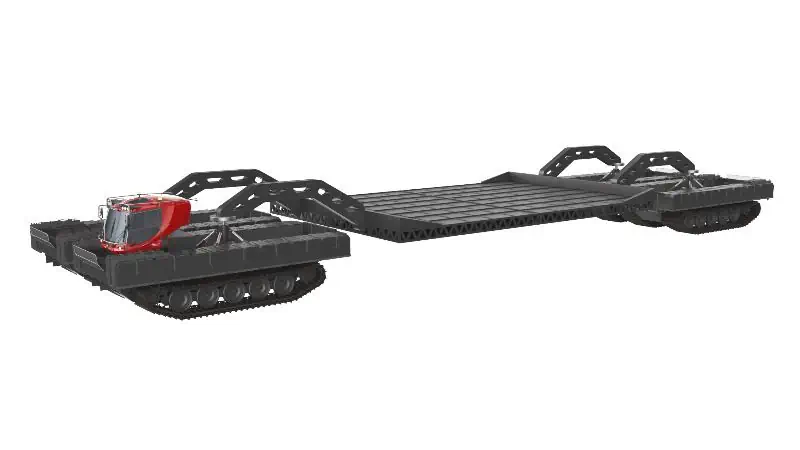
Dessutom utvecklas kapslingar för funktionella moduler som ska placeras på fordonet: passagerar- och teknikmoduler.
Passagerarmodulen möjliggör transport av ett arbetslag och används för hushållsändamål, med möjlighet till förlängd vistelse. Skrovet är isolerat och har särskilda system ombord för autonom drift vid temperaturer ned till -60 grader Celsius.
Teknikmodulen är utformad för att rymma arbetsbänkar och mindre utrustning i bordsnivå. Eftersom de nedre hörnen av höljet inte används, använde vi en icke-standardiserad trunkerad form för höljet, vilket gjorde det möjligt att öka höjden på teknikmodulens inre utrymme samtidigt som maskinens höjd förblev oförändrad.