Forschung und Entwicklung eines Robotersystems für den Anbau und die Ernte von Tomaten.
Das Projekt löst das Problem der schwierigen Arbeitsbedingungen (hohe Temperaturen und Luftfeuchtigkeit) für Menschen, die hochreifes Gemüse anbauen und ernten (wo die manuelle Ernte und das Verpacken in einzelne Behälter für den Einzelhandelsverkauf erforderlich ist).
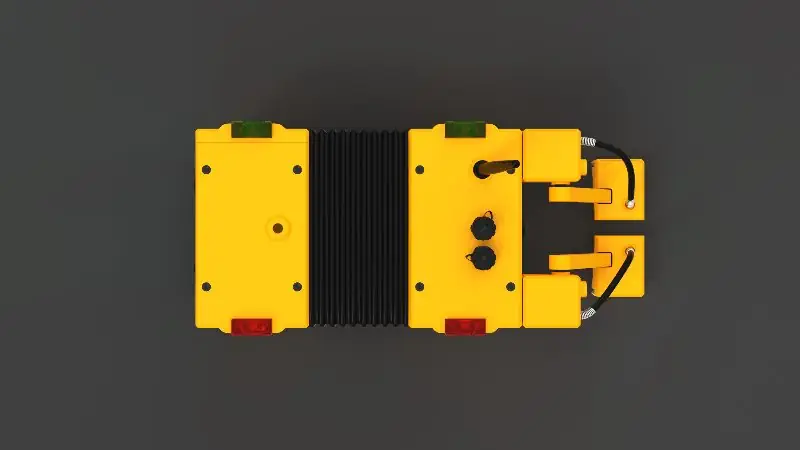
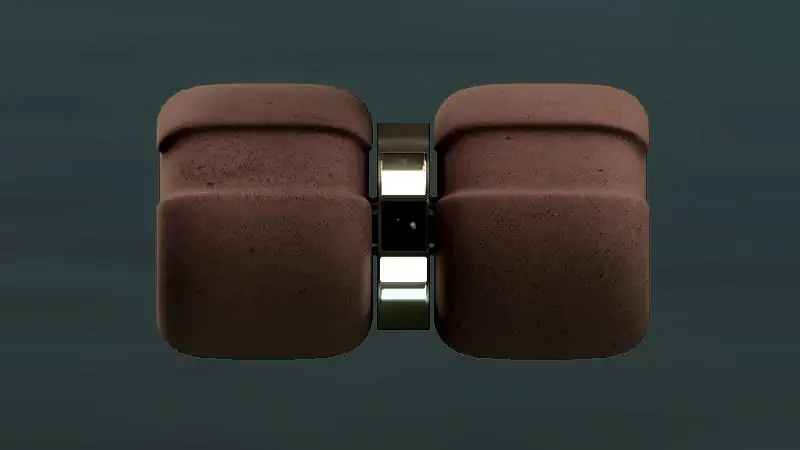
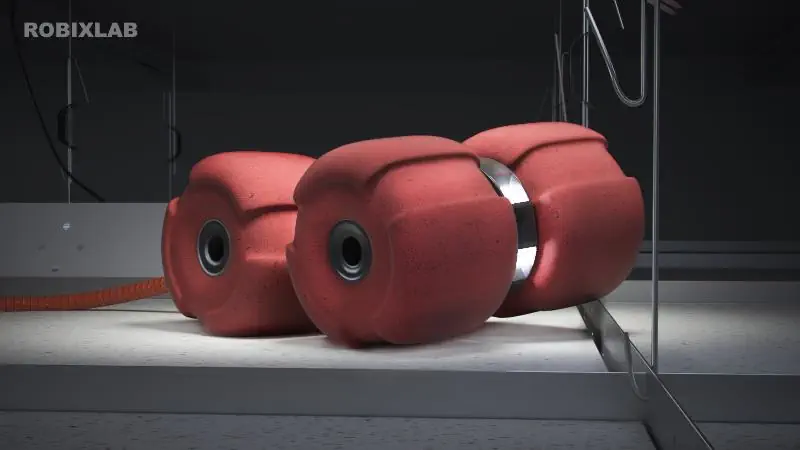
Wir haben das Konzept des Roboters auf der Grundlage einer detaillierten Studie des realen Gewächshausbetriebs entwickelt. Das Schlüsselelement ist eine Reihe von austauschbaren Funktionsmodulen, die auf einem kollaborativen Arm untergebracht sind, der sich auf einem beweglichen Chassis bewegt.
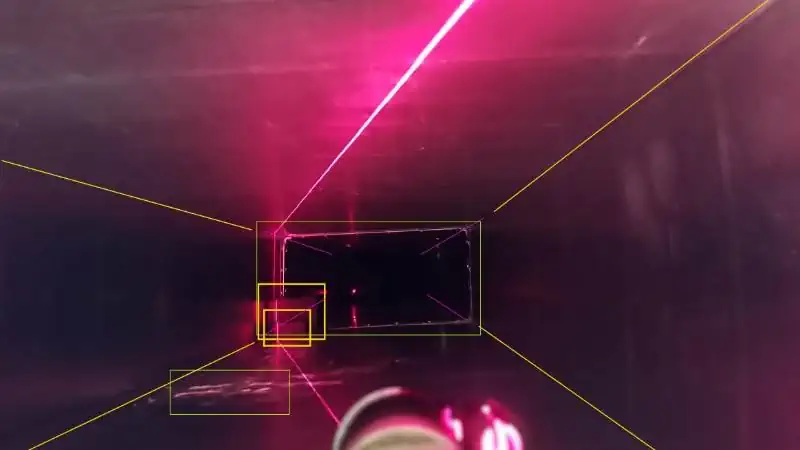
Für die Handhabung von Tomaten, die in Trauben wachsen, haben wir einen speziellen Schneidegreifer entwickelt, der mit einer Vorabkontrolle des Reifegrads ausgestattet ist. Darüber hinaus haben wir ein Software-Demonstrationssystem mit einem neuronalen Netz implementiert. Es erkennt die Wachstumspunkte der Triebe am Strauch, so dass sie beim Anbau abgeschnitten werden können.
Um die Geschwindigkeit des Roboters zu erhöhen, haben wir eine spezielle Ausrüstung für "vertikale Farmen" (automatische Gewächshäuser) entwickelt. Die Kombination aus diesem Gewächshauslayout und dem Robotersystem ermöglicht es, alle Anbau- und Ernteaufgaben effizient zu bewältigen. Das Ergebnis ist ein Automatisierungsgrad von 85%, einschließlich der Automatisierung von Verpackungs- und Palettiervorgängen.