Research and development of a robotic system for growing and harvesting tomatoes
The project solves an issue of difficult working conditions for people in greenhouses who grow and harvest vegetables with a high level of ripeness ( in cases when hand-harvesting and packaging in individual containers for retail sale is required).
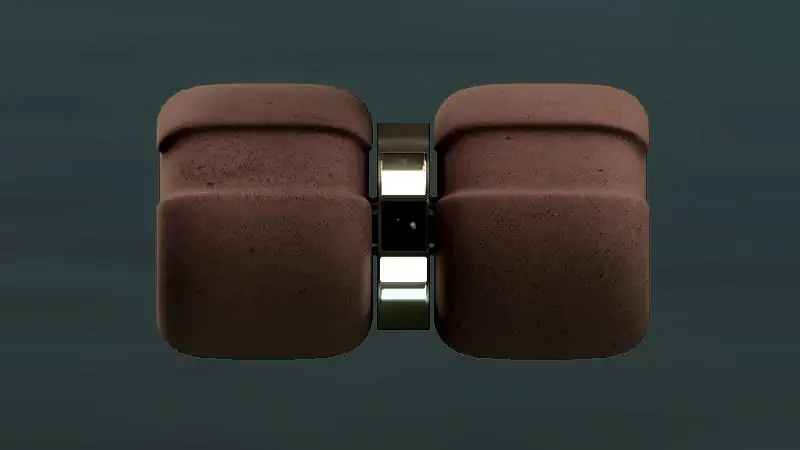
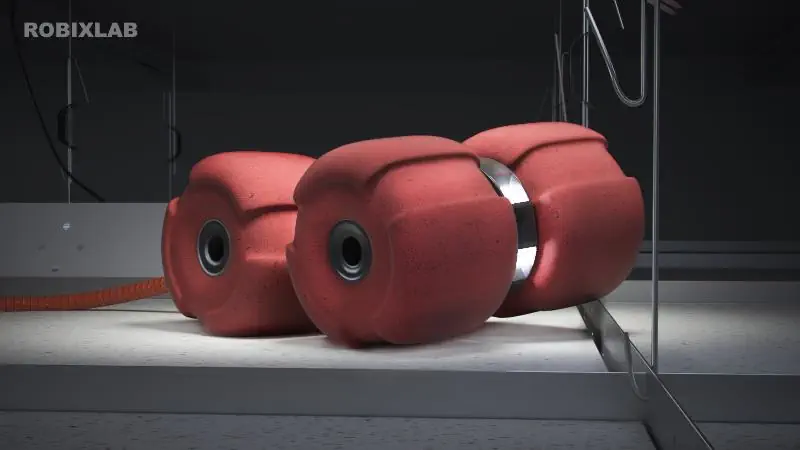
We developed the concept of a robot based on the results of a detailed study, which tackled an issue of a real activity management in greenhouses. The main element is a set of replaceable function modules placed on a collaborative manipulator sliding on a movable chassis.
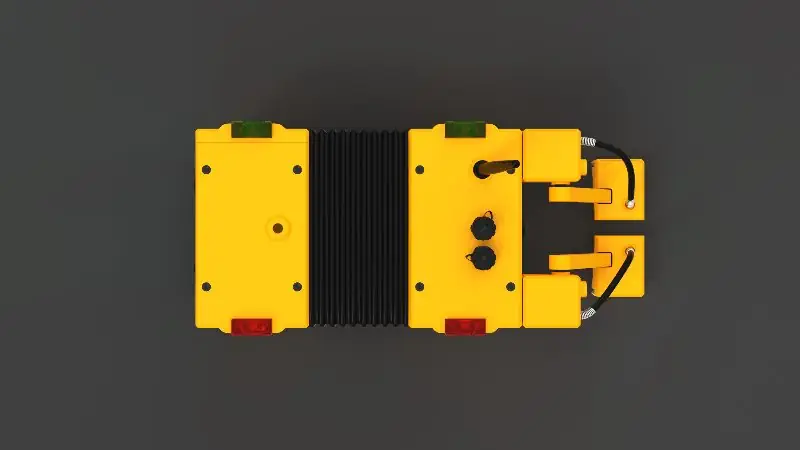
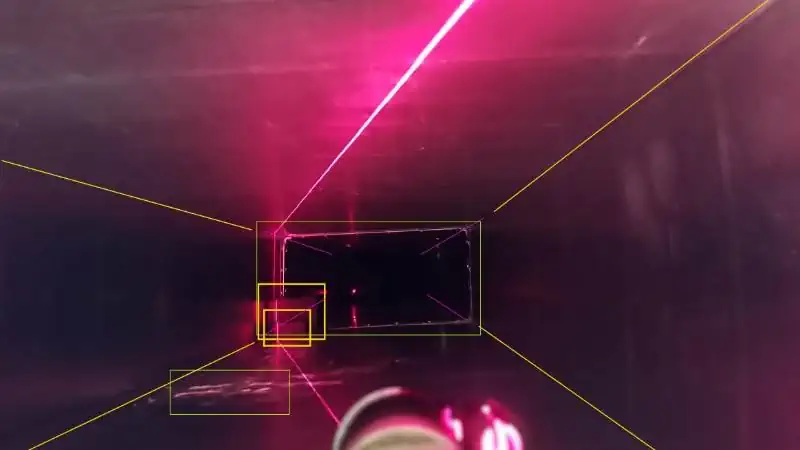
To work with tomatoes growing in clusters, we designed a special end-module with gripper and cutter, which is equipped with means for preliminary ripeness checking . In addition to this we implemented a demo version of software with a neural network . It recognizes shoot growing points on the bush in order to cut them off during the growing process.
To increase the speed capability of the robot, we have developed special equipment for "vertical farming" ( aka automated greenhouses). It is the combination of this greenhouse scheme and a robotic complex that allows you to effectively solve all the tasks of growing and harvesting. As a result, we get 85% automation, including automation of packing and palletizing operations.