Recherche et développement d'un système robotisé pour la culture et la récolte des tomates
Le projet résout le problème de la dureté du travail humain lors de la culture et de la récolte de légumes à haute maturité (où la récolte manuelle et le conditionnement dans des conteneurs individuels pour la vente au détail sont nécessaires).
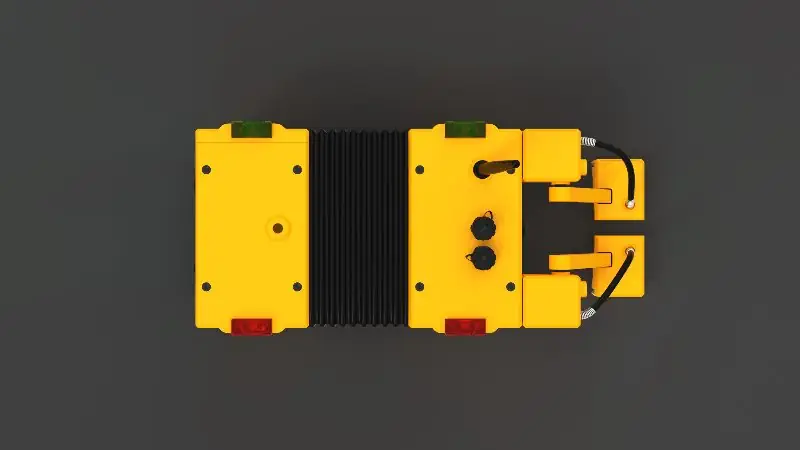
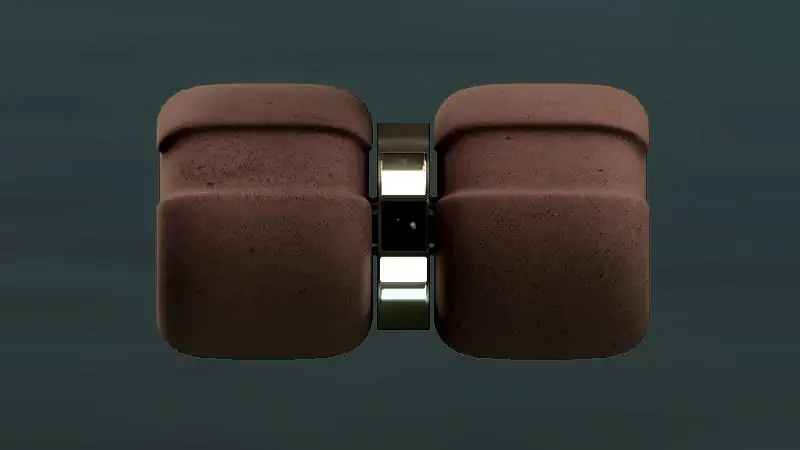
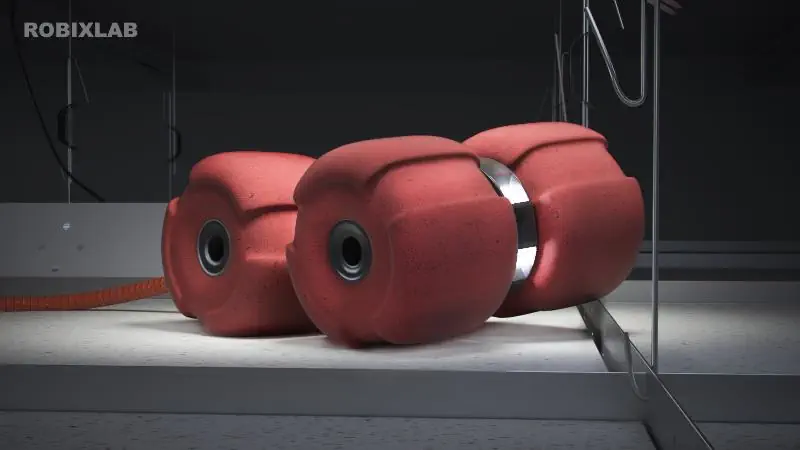
Nous avons développé le concept du robot à partir d'une étude détaillée des opérations de serre dans le monde réel. L'élément clé est un ensemble de modules fonctionnels interchangeables logés sur un manipulateur collaboratif qui se déplace sur un châssis mobile.
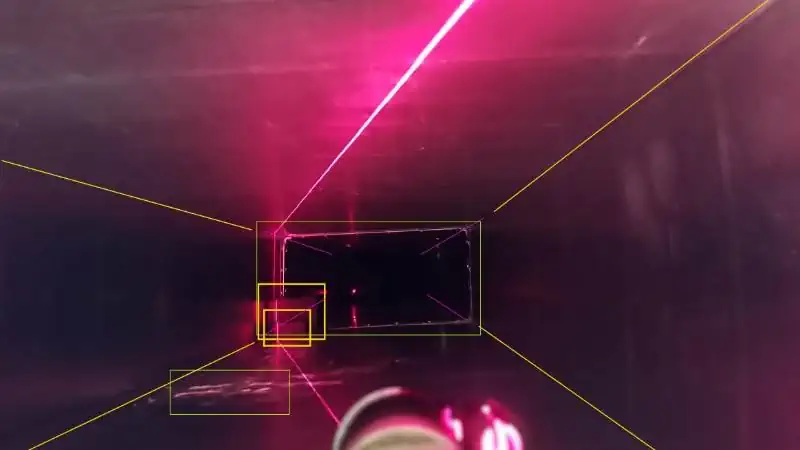
Pour la manipulation des tomates en grappes, nous avons conçu une griffe de agrippeur spéciale équipée d'un système de pré-contrôle de maturité. En outre, nous avons mis en œuvre un système logiciel de démonstration avec un réseau neuronal. Il reconnaît les points de croissance des pousses sur le buisson afin de pouvoir les couper pendant la culture.
Pour augmenter la vitesse du robot, nous avons développé un équipement spécial pour les "fermes verticales" (serres automatisées). C'est la combinaison de cet aménagement de la serre et du système robotique qui permet de traiter efficacement toutes les tâches de culture et de récolte. Le résultat est un niveau d'automatisation de 85%, y compris l'automatisation des opérations d'emballage et de palettisation.