Ricerca e sviluppo del sistema robotizzato per la coltivazione e la raccolta dei pomodori
Il progetto risolve il problema delle faticose condizioni di lavoro umano (in serra) durante la coltivazione e la raccolta di ortaggi ad alta maturazione (che richiedono l'assemblaggio manuale e il confezionamento in contenitori individuali per la vendita al dettaglio).
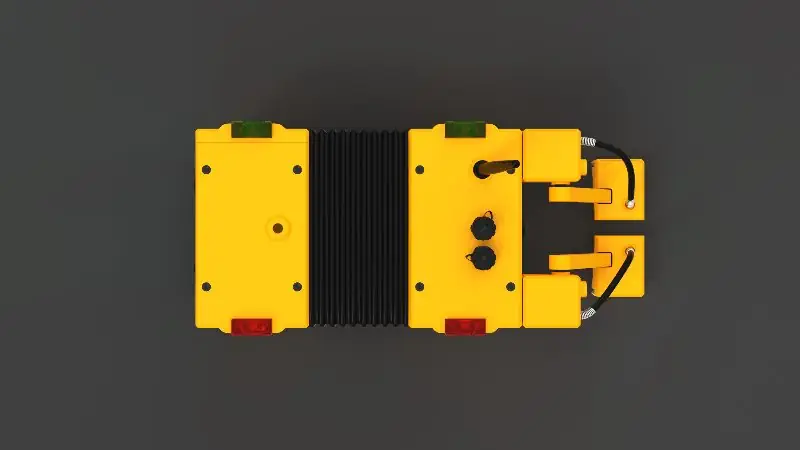
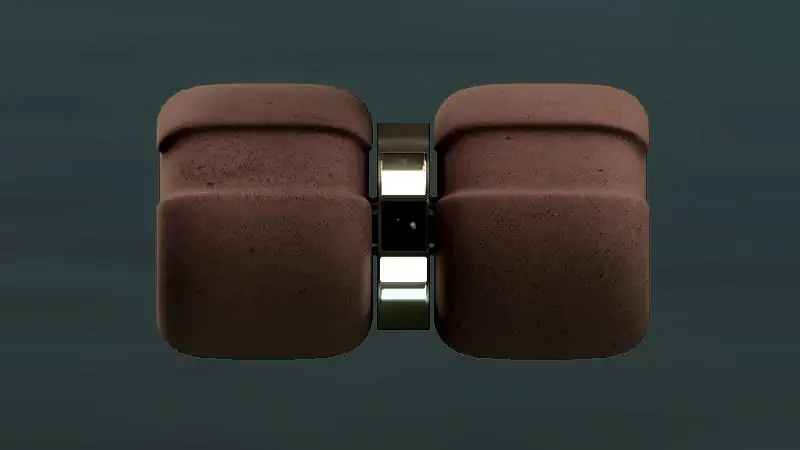
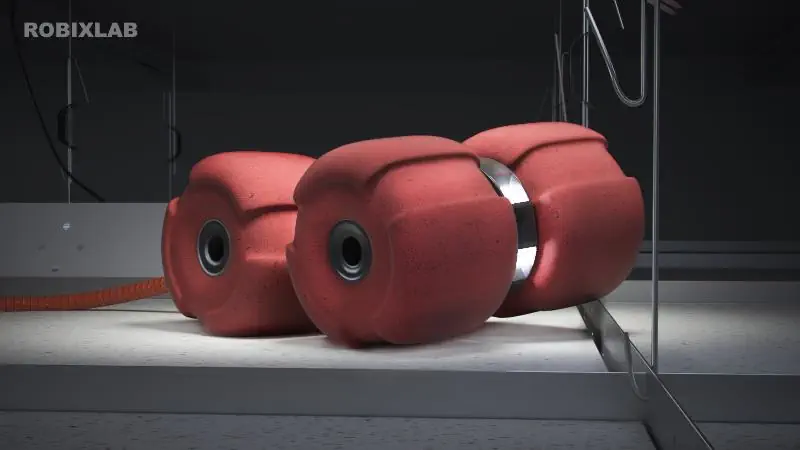
Abbiamo sviluppato il concetto di robot a partire da uno studio dettagliato delle operazioni in serra nel mondo reale. L'elemento chiave è una serie di moduli funzionali intercambiabili, alloggiati su un braccio collaborativo che si muove su un telaio mobile.
Per gestire i pomodori a grappolo, abbiamo progettato un modulo speciale (pinza di taglio) dotato di strutture per il controllo preliminare della maturazione. Inoltre, abbiamo implementato un sistema software dimostrativo con una rete neurale. Riconosce i punti di crescita dei germogli sul cespuglio in modo da poterli tagliare durante la coltivazione.
Per aumentare la velocità del robot, abbiamo sviluppato un'attrezzatura speciale per le "fattorie verticali" (serre automatizzate). La combinazione di questa disposizione della serra e del sistema robotizzato consente di gestire in modo efficiente tutte le attività di coltivazione e raccolta. Il risultato è un livello di automazione dell' 85%, compresa l'automazione delle operazioni di imballaggio e pallettizzazione.