Исследования и разработка роботизированной системы для выращивания и сбора урожая томатов
Проект решает проблему тяжёлых условий труда людей при выращивании и уборке урожая овощей высокого уровня спелости (когда требуется ручная сборка и упаковка в индивидуальные контейнеры для розничной продажи).
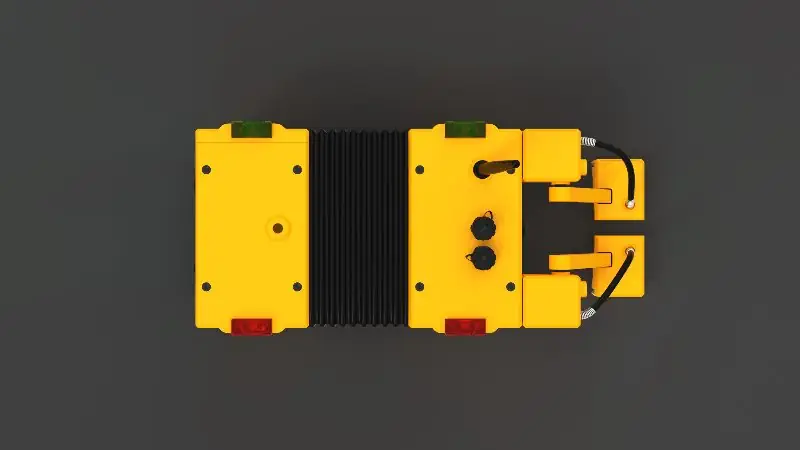
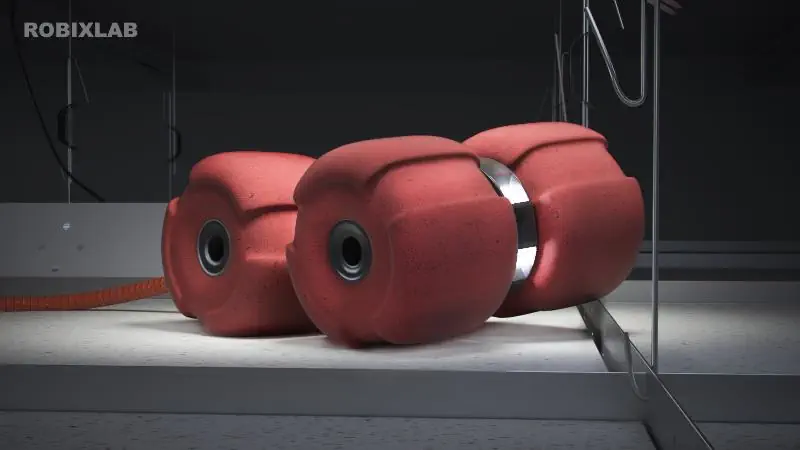
Мы разработали концепцию робота по результатам детального изучения реальной организации работ в теплицах. Ключевым элементом является набор сменных функциональных модулей, размещаемых на коллаборативном манипуляторе, перемещаемом на подвижном шасси.
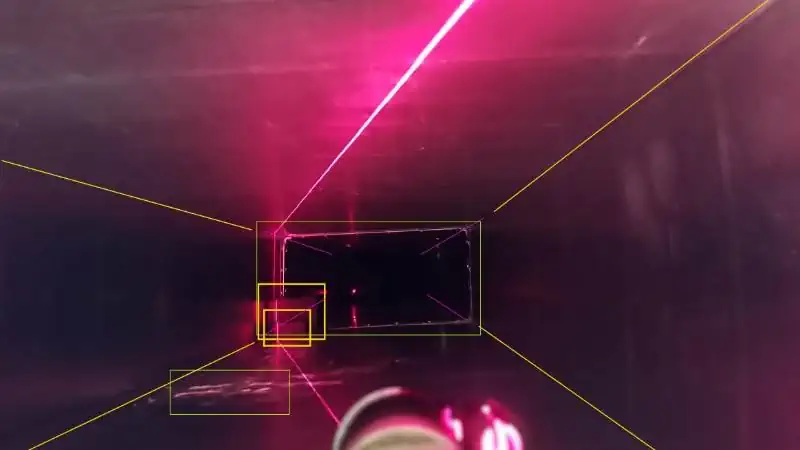
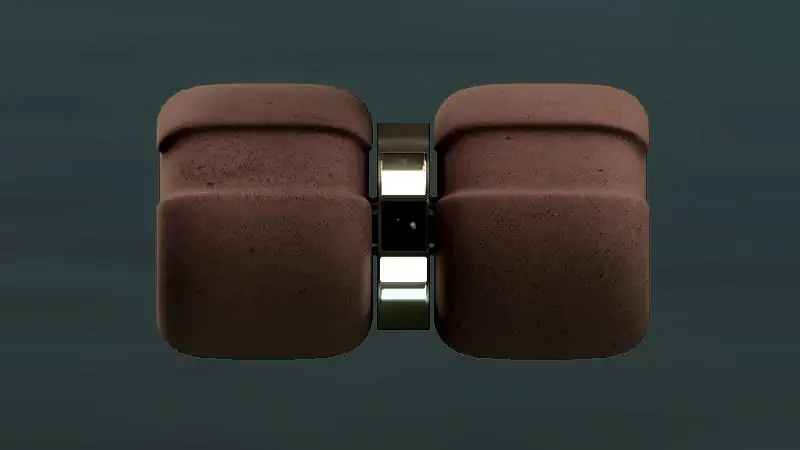
Для работы с томатами, растущими гроздями, мы спроектировали специальный срезающий захват, оснащённый средствами для предварительной проверки на спелость. В дополнение к этому мы реализовали демонстрационный программный комплекс с нейронной сетью. Она распознаёт точки роста побегов на кусте, что бы производить их купирование в процессе выращивания.
Для повышения скорости работы робота мы разработали специальное оснащение для «вертикальных ферм» (автоматизированных теплиц). Именно сочетание этой схемы теплицы и роботизированного комплекса позволяет эффективно решать все задачи по выращиванию и уборке урожая. В результате мы получаем 85% уровень автоматизации, включая автоматизацию операций по упаковке и укладке на паллеты.