Forskning och utveckling av ett robotsystem för odling och skörd av tomater
Projektet löser problemet med svåra arbetsförhållanden (temperatur och luftfuktighet) för personer som odlar och skördar grönsaker med hög mognad (där manuell skörd och förpackning i enskilda behållare för detaljhandelsförsäljning krävs).
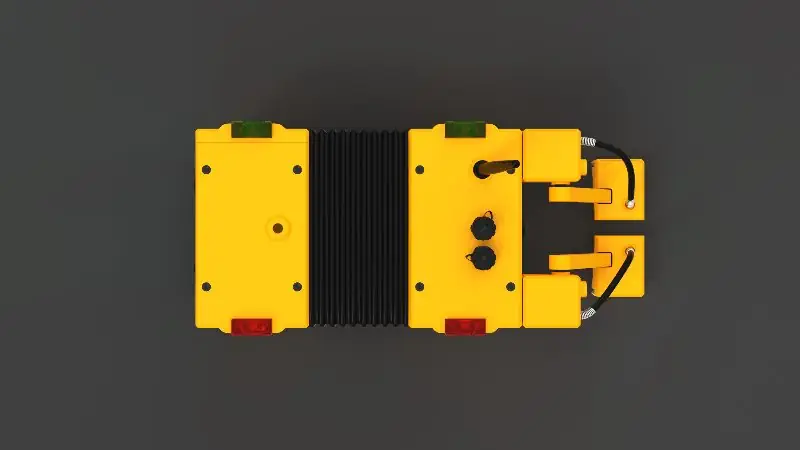
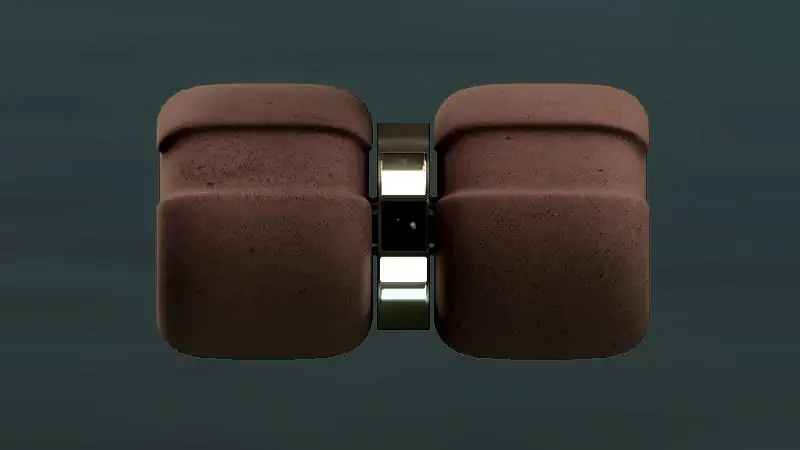
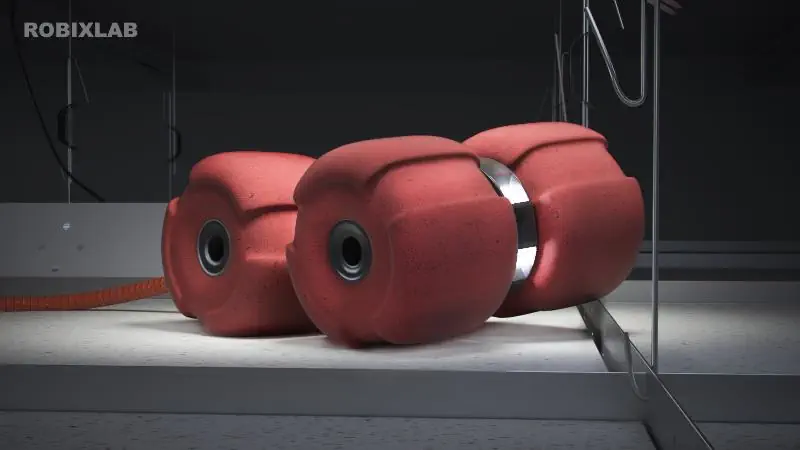
Vi utvecklade robotkonceptet baserat på en detaljerad studie av verklig växthusverksamhet. Nyckelelementet är en uppsättning utbytbara funktionella moduler som sitter på en kollaborativ arm som rör sig på ett rörligt chassi.
För att hantera tomater som växer i klasar har vi konstruerat ett speciellt skärande grepp som är försett med ett system för förhandskontroll av mognad. Dessutom har vi implementerat ett demonstrationssystem med ett neuralt nätverk. Den känner igen tillväxtpunkterna för skotten på busken så att de kan klippas av under odlingen.
För att öka robotens hastighet har vi utvecklat särskild utrustning för "vertikala gårdar" (automatiserade växthus). Det är kombinationen av denna växthuslayout och robotsystemet som gör att alla odlings- och skördeuppgifter kan hanteras effektivt. Resultatet är en 85-procentig automatiseringsnivå, inklusive automatisering av förpackning och palletering.